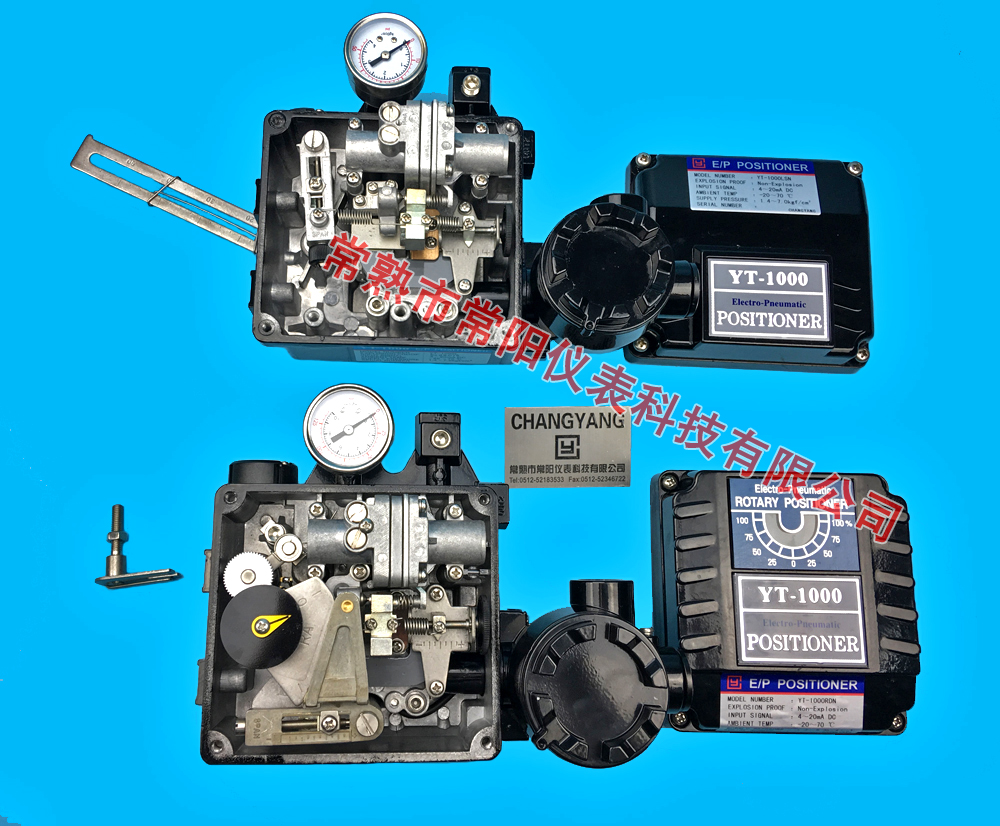
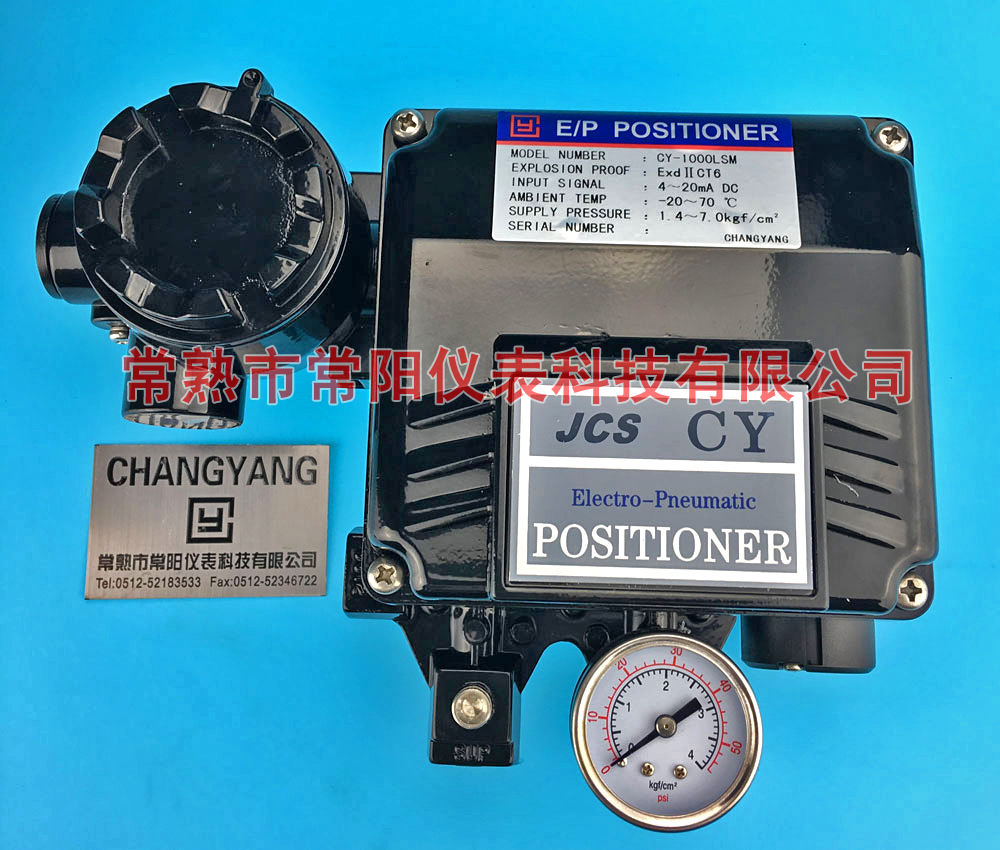
智能阀门定位器介绍 在工业过程自动化控制中,气动调节阀是流体控制系统中重要的执行单元(类似于手脚),对整个系统的流体控制和调节起到至关重要的作用。而电气阀门定位器作为调节阀的主要控制附件,接收标准的控制信号(4―20mA模拟信号;或HART协议及总线等数字信号),把它们对应地变成机械位移(如直线行程或角度位移),来改变阀门的开度(即流通面积),从而达到控制流体参数(流量、压力、温度等)的目的,使整个控制系统连续、稳定有效地运行。 以下主要介绍了智能阀门定位器,带智能阀门定位器而使控制阀具有智能化功能智能阀门定位器与普通阀门定位器的主要区别: 1.控制阀流量特性的实现方式不同。智能定位器的反馈部分采用线性反馈,所需控制阀流量特性是在设定回路实现的。普通定位器的反馈部分是不同形状的凸轮,通过改变凸轮形状来实现所需控制阀流量特性。 2.输入输出方式不同。通常,智能阀门定位器是智能电气阀门定位器。与一般电气阀门定位器比较,智能电气阀门定位器的输入信号是标准的4~20mA或1~5V电信号,它需要经模数转换后作为微处理器的输入信号。而一般电气阀门定位器输入信号虽然是4―20mA或l~5V电信号,但它不需要经模数转换,可直接送电磁线圈产生电磁力,实现力平衡。智能阀门定位器的输出信号是数字信号,它通常送压电阀组,通过压电阀组的开关来调节送控制阀膜头的气压,一般电气阀门定位器的输出信号是经气动放大器放大后的气信号。 3.采用的控制方式不同。智能阀门定位器与一般的计算机控制装置类似,采用离散控制方式,因此,在采样间隔内,控制阀开度不变化。运行过程中,控制阀开度呈现阶梯形变化。一般阀门定位器采用连续控制方式,因此,整个控制过程中,控制阀开度的变化是连续的(除了因死区造成的跃变外)。 3.采用的控制方式不同。智能阀门定位器与一般的计算机控制装置类似,采用离散控制方式,因此,在采样间隔内,控制阀开度不变化。运行过程中,控制阀开度呈现阶梯形变化。一般阀门定位器采用连续控制方式,因此,整个控制过程中,控制阀开度的变化是连续的(除了因死区造成的跃变外)。 |