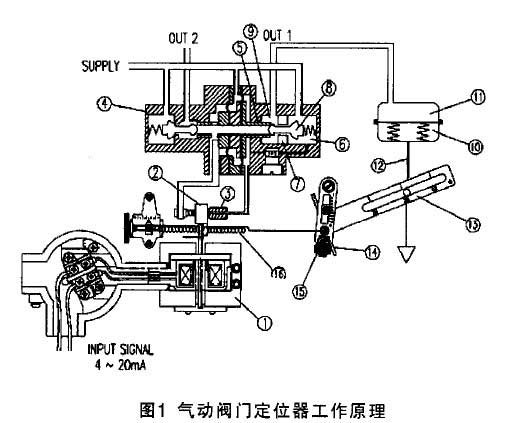
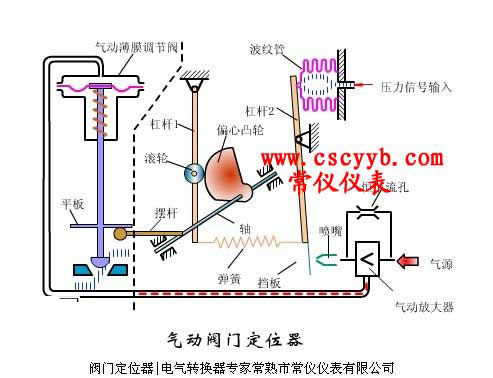
普通阀门定位器与智能阀门定位器的主要区别 阀门定位器,按结构分气动阀门定位器、电气阀门定位器及智能阀门定位器,是调节阀的主要附件,通常与气动调节阀配套使用,它接受调节器的输出信号,然后以它的输出信号去控制气动调节阀,当调节阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位状况通过电信号传给上位系统。 智能阀门定位器由微处理器、压电式阀、阀位检测与反馈部件、壳件与盖板及电气接线盒组成的不需要人工调校,可以自动检测所带调节阀零点,满程,摩擦系数,自动设置控制参数的阀门定位器。 1、控制阀流量特性的实现方式不同 智能定位器的反馈部分采用线性反馈,所需控制阀流量特性是在设定回路实现的。普通定位器的反馈部分是不同形状的凸轮,通过改变凸轮形状来实现所需控制阀流量特性。 2、输入输出方式不同 通常,智能阀门定位器是智能电气阀门定位器。与一般电气阀门定位器相比较,智能电气阀门定位器的输入信号是标准的4-20mA或1-5V电信号,它需要经模数转换后作为微处理器的输入信号。而一般电气阀门定位器输入信号虽然是4-20mA或1-5V电信号,但它不需要经模数转换,可直接送电磁线圈产生电磁力,实现力平衡。智能阀门定位器的输出信号是数字信号,它通常送压电阀组,通过压电阀组的开关来调节送控制阀膜头的气压,一般电气阀门定位器的输出信号是经气动放大器放大后的气信号。 3、采用的控制方式不同 智能阀门定位器与一般的计算机控制装置类似,采用离散控制方式,因此,在采样间隔内,控制阀开度不变化。运行过程中,控制阀开度呈现阶梯型变化。一般阀门定位器采用连续控制方式,因此,整个控制过程中,控制阀开度的变化是连续的(除了因死区造成的跃变外)。 4、反馈信号检测处理不同 智能阀门定位器中控制阀反馈信号需经模数转换后送微处理器处理,而一般阀门定位器反馈信号直接作为反馈力(力矩),不需要经模数转换为电信号。一些智能阀门定位器输入信号采用标准模拟信号,在同一导线还传输HART数字信号,组成混合信号的智能阀门定位器,它不属于现场总线智能阀门定位器,但仍属于智能阀门定位器。 |