|
不少资料介绍,控制阀安装阀门定位器后,可以通过选择不同形状的凸轮,改变阀的流量特性,改变控制阀气开或气关形式。本文分析了阀门定位器的功能,表明通过选择不同形状的凸轮,可改变阀的流量特性,但使控制系统不稳定。智能电气阀门定位器将是今后用于控制阀,提高控制系统性能的主要设备。
一、 智能电气阀门定位器
智能电气阀门定位器针对L述问题,提出如下改进。图4是其原理框图
(1)消除副环非线性特性:非线性补偿环节设置在前向通道,不设置在反馈通道,反馈通道采用线性环节,不采用非线性的凸轮,从而保证副环主要用于克服阀杆的死区、摩擦等扰动影响,充分发挥串级副环回路能有效克服进入副环扰动的优点。
(2)非线性补偿范围扩大:非线性补偿环节设置在前向通道后,可有效地补偿被控过程的非线性,补偿范围可根据被控过程由人工设定。例如,pH等非线性过程也可采用智能阀门定位器进行补偿,而这是一般阀门定位器无法实现的;对于压降比小于1造成的流量特性畸变,也可采用人工设定的非线性环节补偿。
(3)消除串级共振:在副环中,可调整前向通道放大器,或在主环中,可改变非线性补偿环节的增益,使主副被控对象的时间常数错开,消除串级控制系统的共振。
二、 控制系统的运行准则
反馈控制系统是最常用的形式。为使控制系统能够稳定运行,需要满足下列准则。
(1)负反馈准则:控制系统成为负反馈的条件是该控制系统各开环增益之积为正。
(2)稳定运行准则:在扰动或设定变化时,控制系统静态稳定运行条件是控制系统各环节增益之积恒定;控制系统动态稳定运行条件是控制系统总开环传递函数的模恒定。
三、 阀门定位器的工作原理
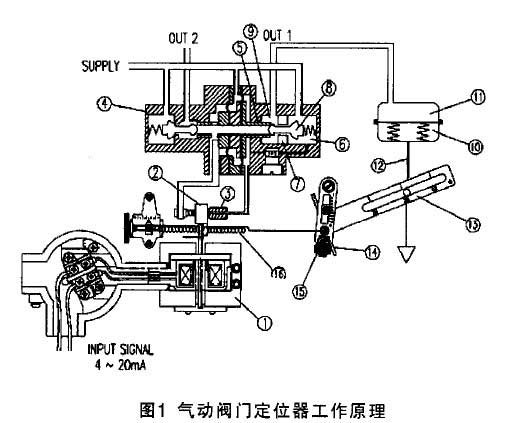
根据所使用的输入信号,阀门定位器分为气动阀门定位器和电气阀门定位器两类,电气阀门定位器又分为普通和智能两类。电气阀门定位器除了有气动阀门定位器的功能外,还有电气转换功能,智能电气阀门定位器采用微处理器实现数字控制,具有更强补偿功能。图1是气动阀门定位器的原理示意图。
没有使用气动阀门定位器时,输入信号P1直接进入膜头5,在推力作用下阀杆向下,使阀芯移动,改变流通截面,从而使流量变化。由于阀杆受到摩擦力,因此,在一定输入信号作用下,阀杆可能没有移动。不能使阀杆移动的最小输入信号称为死区。为此,采用阀门定位器。
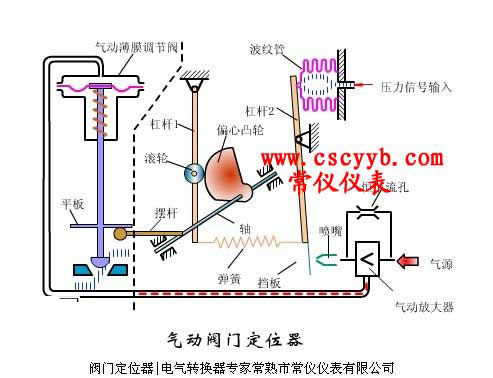
使用阀门定位器后,输入信号先进入波纹管1,使杠杆2靠近喷嘴3,喷嘴的背压增大,经放大器4后输出的信号送膜头5,阀杆移动的反馈信号经连杆传递,转换为凸轮6的转动,并使杠杆2离开喷嘴3,达到新的平衡点,如果阀杆与输入信号不对应,则在负反馈作用下,会改变进入膜头的气压,直到新平衡点建立。图2是阀门定位器的原理框图。可以看到,这是一个负反馈控制系统,除反馈信号直接来自阀杆外,与气动压力变送器的部分结构十分相似。电气阀门定位器的工作原理与气动阀门定位器也很相似,但输入信号是电信号,其工作原理与电动压力变送器也十分相似。

四、 阀门定位器的功能
加入阀门定位器后,组成以阀杆位移为副被控变量的副环控制回路,它与原有单回路控制系统组成串级控制系统,原有的被控变量成为串级控制系统的主被控变量。因此,根据串级控制系统的功能分析,添加阀门定位器可改善控制系统功能。阀门定位器的主要功能如下。
(1)对于进入副回路的干扰,例如,摩擦力、不平衡力和回差的变化等,该系统具有较强的克服能力。这是使用阀门定位器的重要原因。因此,阀门定位器常被用于干摩擦较大的场合来减小回差影响;用于补偿高压差工况下不平衡力的效应,减小不平衡力对阀杆的影响;可以用于介质有较大阻力,例如,悬浮液控制等场合,用以减小介质造成的回差等影响。
(2)由于采用凸轮作为反馈环节,因此,改变凸轮的形状能改变副环外特性的增益,补偿被控对象的非线性特性;此外,改变凸轮形状还可使对应于阀杆全行程的输入信号范围改变,从而被用于分程控制。
(3)组成阀杆行程副环,可使副回路等效时间常数大大减小,同时,因波纹管的气容较控制阀膜头的气容小得多,也使系统时间常数减小,从而改善控制阀动态特性。
需要说明,安装阀门定位器后,可以通过选择不同形状的凸轮,改变阀的流量特性,改变控制阀气开或气关形式。从上述分析可知,控制阀的气开和气关是确定其增益为正或为负,而串级副环的外特性可近似为1:1线性环节(采用线性反馈),因此,通过选择阀门定位器的凸轮形状,及改变喷嘴位置或电流端子反接,可改变副环外特性的增益符号。选择不同形状凸轮可改变控制阀的流量特性(通常改为等百分比特性),但因副环总开环增益变化,根据稳定运行准则,这会使系统不稳定。
五、阀门定位器的振荡
安装阀门定位器后,控制系统易发生振荡,其原因如下。
(1)由于组成串级控制系统,因此,添加阀门定位器后可能出现串级控制系统的共振现象。从副环频率特性看,当副控制回路按随动控制系统整定成衰减振荡状态时,等效副回路可近似为一个二阶振荡环节,图3显示了等效副环的频率特性。工作在低频段时,可近似为1:1比例环节,但工作频率提高时,可使系统谐振,这时,相位移为180°,即成为正反馈。添加阀门定位器后,由于原被控对象时间常数较小,组成串级控制系统后,广义对象时间常数匹配不当会造成系统输出振荡。例如,有些流量和快速压力控制系统中添加阀门定位器后出现系统输出的振荡现象。

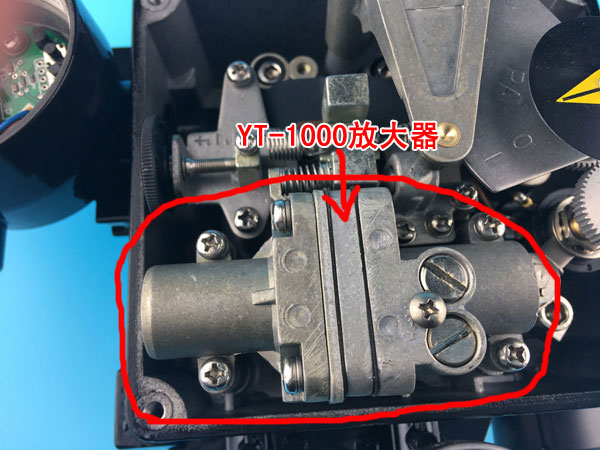
(2)采用凸轮改变控制阀流量特性时,在串级系统的副环引入了非线性环节,如果凸轮形状不合适,或气动放大器不稳定(增益较大),都会使副环的开环总增益变化,从而使控制系统不稳定。通常出现小流量时反而振荡的现象,这也是造成振荡的重要原因。经验表明,更换定位器凸轮或放大器后,控制系统可不再振荡,这是因改变了副环总增益所造成。 作者:王朋 倪雁 王为国 何衍庆 来源:互联网
|