阀门定位器原理动画
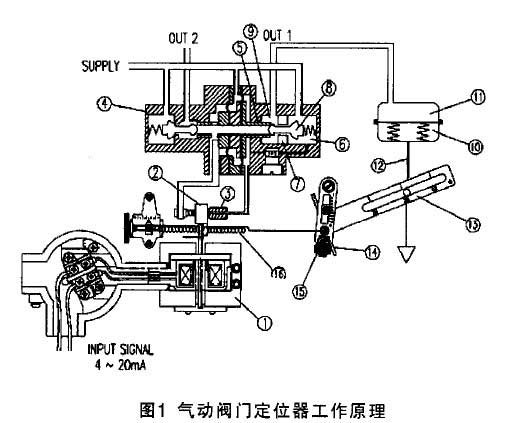
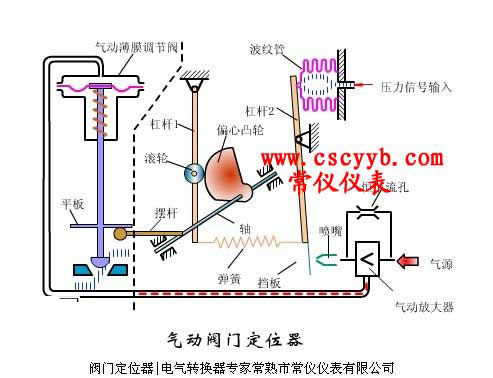
阀门定位器有气动和电动两大类,是气动执行器的主要附件,它与气动调节阀配套使用。阀门定位器接受调节器输出信号,然后将调节器的翰出信号成比例地输出到执行机构。当阀杆移动以后,其位移童又通过机械装置负反馈作用于阀门定位器,因此它与执行机构组成一个闭环系统。
阀门定位器能够增加执行机构的愉出功率,减少控制信号的传递滞后,加快阀杆的移动速度。提高信号与阀位间的线性度,克服阀杆的摩擦力,消除不平衡力的影响,从而保证调节阀的正确定位,改善了调节阀的性能。目前使用电动调节器居多,这里介绍电一气阀门定位器。
结构与工作原理
采用电一气阀门定位器后,可用电动调节器输出的0-10mA或4-2OmA DC电流信号去操纵气动执行机构。一台电一气阀门定位器具有电一气转换器和气动阀门定位器的双重作用。
图9-18是配气动薄膜执行机构的电-气阀门定位器的动作原理图和实物图。
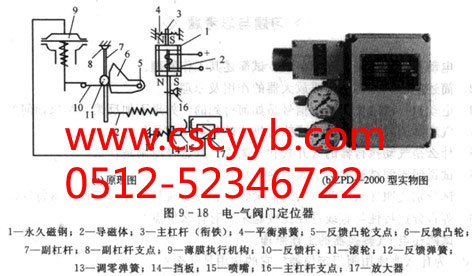
由永久磁钢1、导磁体2、线圈、衔铁(即主杠杆3)和工作气隙构成了力矩马达组件,它是将电流变为力(力矩)的转换元件。导磁体和衔铁用高导磁性能的坡莫合金制成。永久磁钢呈U形,其端部N、S两极罩在导磁体上。当信号电流通过线圈时,由于电磁场和永久磁钢的相互作用,使主杠杆3受到一个向左的力,于是它绕支点16偏转,使挡板14靠近喷嘴15,喷嘴背压经放大器17放大后,送人薄膜执行机构9使阀杆向下移动,并带动反馈杆10绕支点5转动。连在同一轴上的反馈凸轮6也作逆时针方向转动,通过滚轮11使副杠杆7绕支点8转动,将反馈弹簧12拉伸。弹赞12对主杠杆的拉力与力矩马达作用在主杠杆上的力两者力矩平衡时,仪表便达到平衡状态。此时,一定的信号电流就被转换为一定的气压信号,并与阀门位置成精确的对应关系。弹簧13是作调整零位用的。改变凸轮6的形状,可以改变输人电流信号与输出阀杆位移的对应关系。
阀门定位器作用
(1)增加执行机构的推力。通过提高定位器的气源压力来增大执行机构的愉出力,可克服介质对阀芯的不平衡力,也可克服阀杆与填料间较大的摩擦力或介质对阀杆移动产生的较大阻力。因此,阀门定位器能用于高压差、大口径、高压、高温、低温及介质中含有固体悬浮物或粘性流体的场合。
(2)加快执行机构的动作速度。调节器与执行机构距离较远时,为了克服信号的传递滞后,加快执行机构的动作速度,必须使用定位器。一般用于两者相距60m以上的场合。
(3)实现分程控制。分程控制时,两台定位器由一个调节器来操纵,每台定位器的工作区间由分程点决定。假定分程点为50%,则调节器0%-50%输出时,第一台定位器愉出 0%-100%.第二台定位器枪出为0;调节器愉出50%^-100%时,第二台定位器输出0% ~100%,第一台定位器翰出一直保持在100%.
(4)改善调节阀的流量特性。通过改变反馈凸轮的几何形状可以改变调节阀的流f特性,这是因为反馈凸轮形状的变化,就改变了执行机构对定位器的反馈量变化规律,使定位器的输出特性发生变化,从而改变了定位器输人信号与执行机构愉出位移间的关系,即修正了流童特性。
除上述外,定位器还能使执行机构由两位动作变成比例动作,能改变调节阀的作用形式,或用于需要电一气转换的复合控制中。
|