|
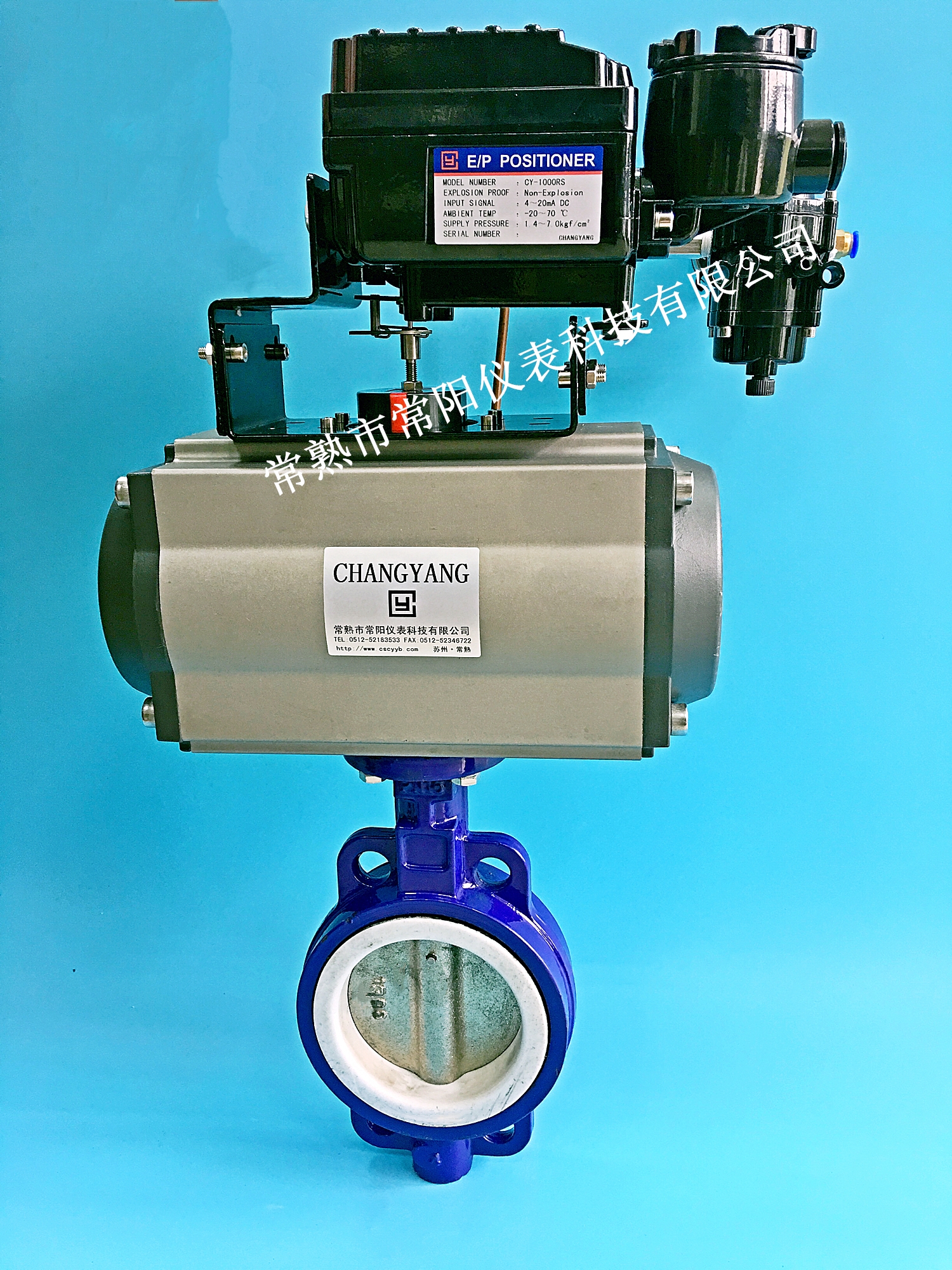
气动调节阀定位器工作原理和系统组成。
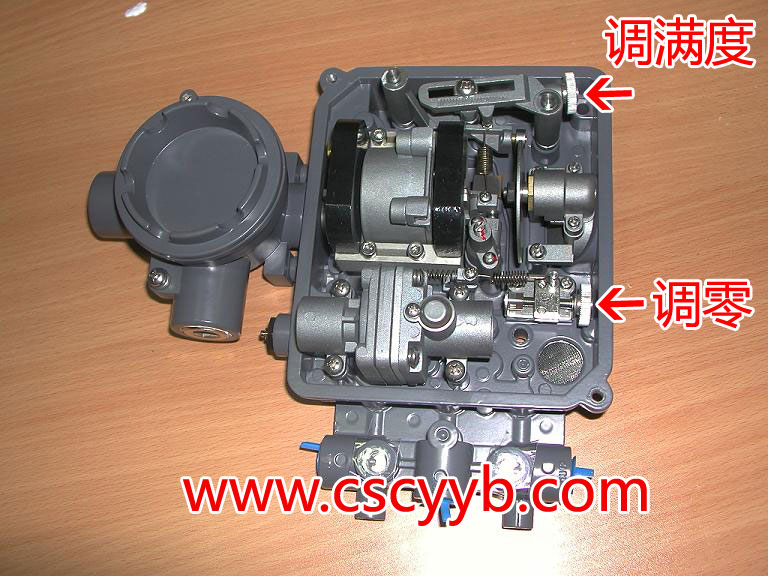
阀门定位器是按力矩平衡原理工作的。如正作用的气动调节阀,来自调节器或输出式安全栅的4~20mA直流信号输入到转换组件中的线圈时,由于线圈两侧各有一块极性方向相同的永久磁铁,所以线圈产生的磁场与永久磁铁的恒定磁场,共同作用在线圈中间的可动铁芯即阀杆上,使杠杆产生位移。当输入信号增加时,杠杆向下运动(作逆时针偏转),固定在杠杆上的挡板便靠近喷嘴,使放大器背压增高,经放大后输出气压也随之增高。此输出气压作用在调节阀的膜头上,使调节阀的阀杆向下运动。
阀杆的位移通过拉杆转换为反馈轴和反馈压板的角位移,并通过调量程支点作用于反馈弹簧上,该弹簧被拉伸,产生一个反馈力矩,使杠杆作顺时针偏转,当反馈力矩和电磁力矩相平衡时,阀杆就稳定于某一位置,从而实现了阀杆位移与输入信号电流成正比例的关系。
调整调量程支点于适当位置,可以满足调节阀不同杆行程的要求。
阀门定位器与阀门配套使用,组成一个闭合控制回路的系统。该系统主要由磁电组件、零位弹簧、挡板、气动功率放大器、调节阀、反馈杠杆、量程调节机构、反馈弹簧组成。 |